Госреестр. Описание типа СИ 55026-13 Координатно-измерительные машины Nikon Metrology - страница 1
Навигация
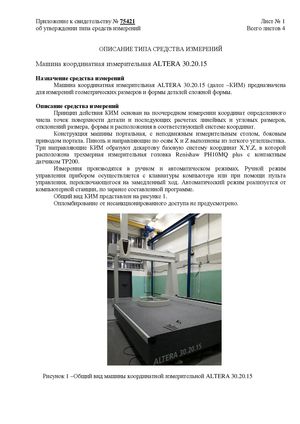 Госреестр. Описание типа СИ 76483-19 Координатно-измерительные машины Nikon Metrology серии ALTERA 30.20.15
Госреестр. Описание типа СИ 76483-19 Координатно-измерительные машины Nikon Metrology серии ALTERA 30.20.15 Госреестр. Методика поверки 76483-19 Координатно-измерительные машины Nikon Metrology серии ALTERA 30.20.15
Госреестр. Методика поверки 76483-19 Координатно-измерительные машины Nikon Metrology серии ALTERA 30.20.15 Госреестр. Описание типа СИ 59277-14. Координатно-измерительные машины Nikon Metrology серии ALTERA
Госреестр. Описание типа СИ 59277-14. Координатно-измерительные машины Nikon Metrology серии ALTERA Координатно-измерительные машины Nikon Metrology
Координатно-измерительные машины Nikon Metrology Госреестр. Описание типа СИ 50108-12 Координатно-измерительные машины Nikon Metrology серии LK V-GP
Госреестр. Описание типа СИ 50108-12 Координатно-измерительные машины Nikon Metrology серии LK V-GP 
Приложение к свидетельству № 52485 Лист № 1 об утверждении типа средств измерений Всего листов 10 ОПИСАНИЕ ТИПА СРЕДСТВА ИЗМЕРЕНИЙ Машины координатные измерительные LK V Назначение средства измерений Машины координатные измерительные LK V (далее - КИМ) являются стационарными машинами и предназначены для измерений геометрических размеров деталей сложной формы, отклонения формы и расположения поверхностей элементов деталей. Описание средства измерений Машины координатные измерительные LK V выпускаются 4 модификаций, каждая из которых включает разные типоразмеры, различающиеся габаритными размерами и точностными характеристиками. КИМ устанавливаются на пассивные или активные монтажные опоры, на которых располагается гранитный рабочий стол. По гранитным направляющим перемещается портал с траверсой, несущей измерительную головку. Три направляющие измерительной машины образуют декартову базовую систему координат X, Y, Z, в которой перемещается трехмерная измерительная головка фирмы Renishaw MH20i, PH20, PH10T, SP80, REVO, PH10M или PH10MQ со стандартными датчиками Renishaw (TP20, TP200) и датчиками сканирующего типа (SP25, RSP2, RSP3) или с лазерными сканерами фирмы Nikon Metrology (LC15, LC15Dx, LC60Dx, XC65D, XC65D-LS, LC50Cx), которые могут работать поочередно. КИМ могут оснащаться системой быстрой установки/снятия измерительного щупа/датчика. Перемещение портала и траверсы осуществляется на воздушных подшипниках. Движение по направляющим вдоль осей X и Z производится за счет фрикционного привода постоянного тока, движение по оси Y - посредством ременной передачи. Перемещающиеся части вдоль осей Y и Z выполнены из полых керамических секций. На столе КИМ расположены отверстия, которые используются для крепления оснасток и непосредственно самих измеряемых объектов. Измерения проводятся в ручном и автоматическом режимах. Ручной режим управления перемещением головки осуществляется при помощи пульта управления. В автоматическом режиме управление осуществляется с помощью компьютера. В процессе работы КИМ на экран монитора выводится трехмерная CAD модель, положение щупа в реальный момент времени, расположение измеряемых точек и величина отклонений расположения от заданных величин. а) б)